使用 2D 电学切片模拟体异质结形貌
https://doi.org/10.4208/cicp.OA-2022-01151. 引言
体异质结(BHJ)是许多有机电子器件的核心微观结构——最著名的是有机太阳能电池,但也包括光电探测器、传感器以及其他混合离子–电子系统,在这些系统中,贯通传输路径和局部瓶颈非常重要。在 BHJ 中,两相在 10–100 nm 尺度上互相贯穿,形成大的内部界面以及一种从根本上不是一维的传输景观。其代价是复杂性:一旦解析了微观结构,就不可避免地会遇到渗流限制、死胡同、收缩通道,以及载流子密度和复合的强烈空间变化。对于大多数日常器件拟合工作,你不会从这里开始。通常你会在 1D 器件 层面工作——快速、稳健,而且通常完全适用——并且可能还会加入诸如陷阱和复合等额外物理过程。例如,OPV 快速入门教程展示了一个标准的 1D 工作流程(在需要时包括陷阱物理),这是大多数常规研究和参数提取的正确工具。
在抽象层级的另一端,如果你的目标是系统级问题,例如尺度扩展、串联/并联损耗或组件/面板行为,那么你通常会转向 大面积 / 电路感知 描述,而不是解析纳米尺度形貌。大面积 PM6:Y6 教程就是这种更高层次建模方法的一个示例。
本教程刻意朝相反方向进行:它保留微观结构(通过显式 BHJ 形貌),但通过在 2D 切片 上求解电学问题来保持计算上的可行性。重点并不是每个器件都应该这样拟合;而是拥有一个可解析微观结构的工作流程在科学和技术上都具有价值。它使你能够检验有效介质假设,观察“简单”模型在何处失效,并建立关于由形貌驱动的性能极限的直觉——特别是在渗流以及空间局域化的陷阱/复合占主导时。
2. 创建形貌仿真并检查 BHJ
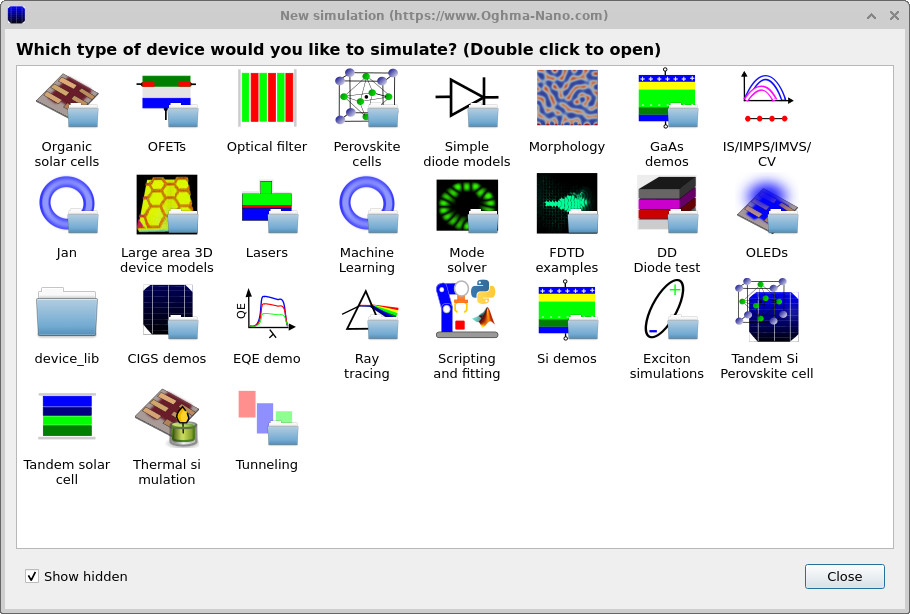
在主窗口中,点击 New simulation。这将打开 ?? 所示的器件类型库。 双击 Morphology,然后将项目保存到你的 本地磁盘上的某个位置。保存到本地很重要,因为形貌解析仿真可能会 生成许多中间文件(网格、快照、缓存),而本地存储通常比网络或云同步文件夹 更快且更可靠。
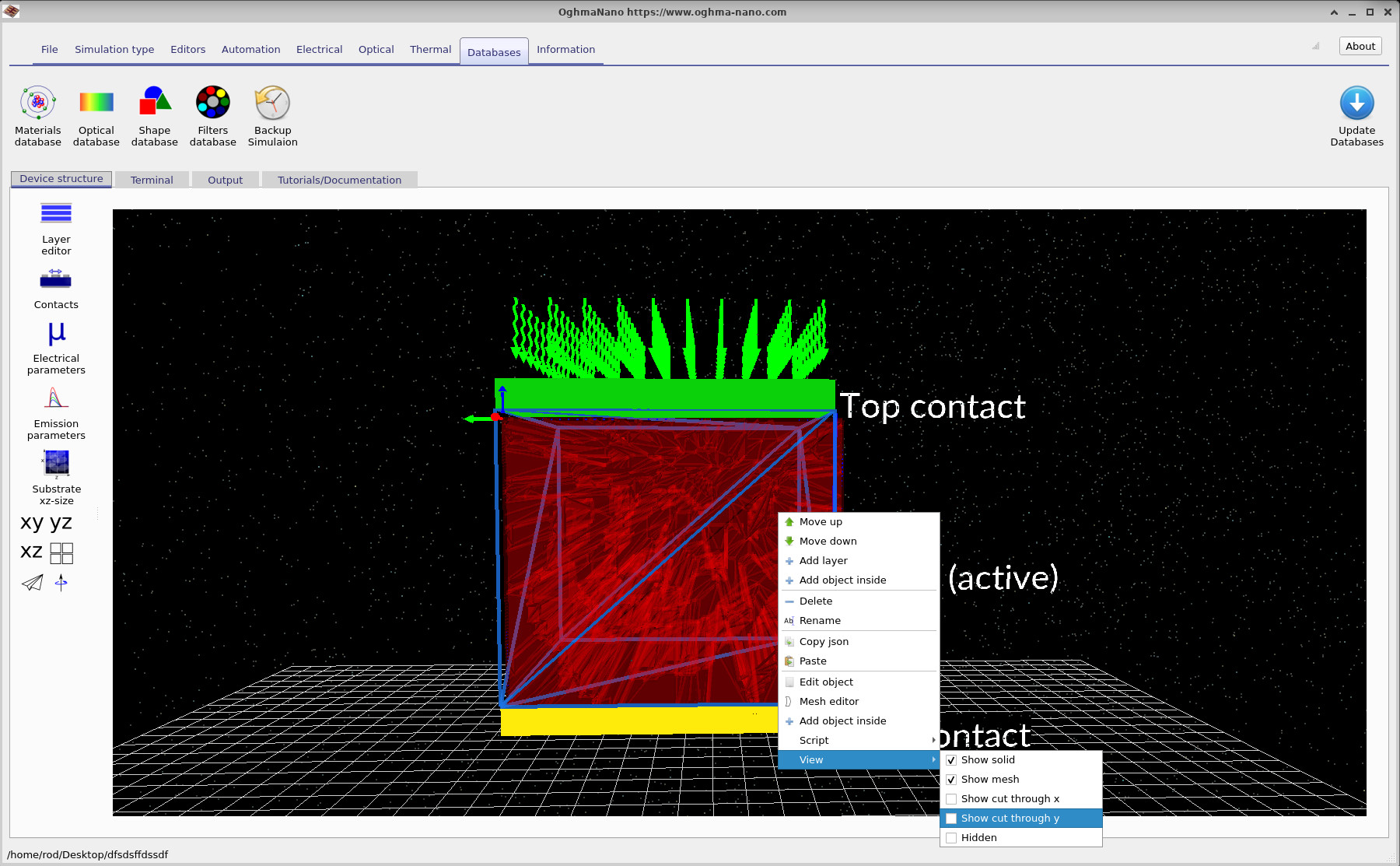
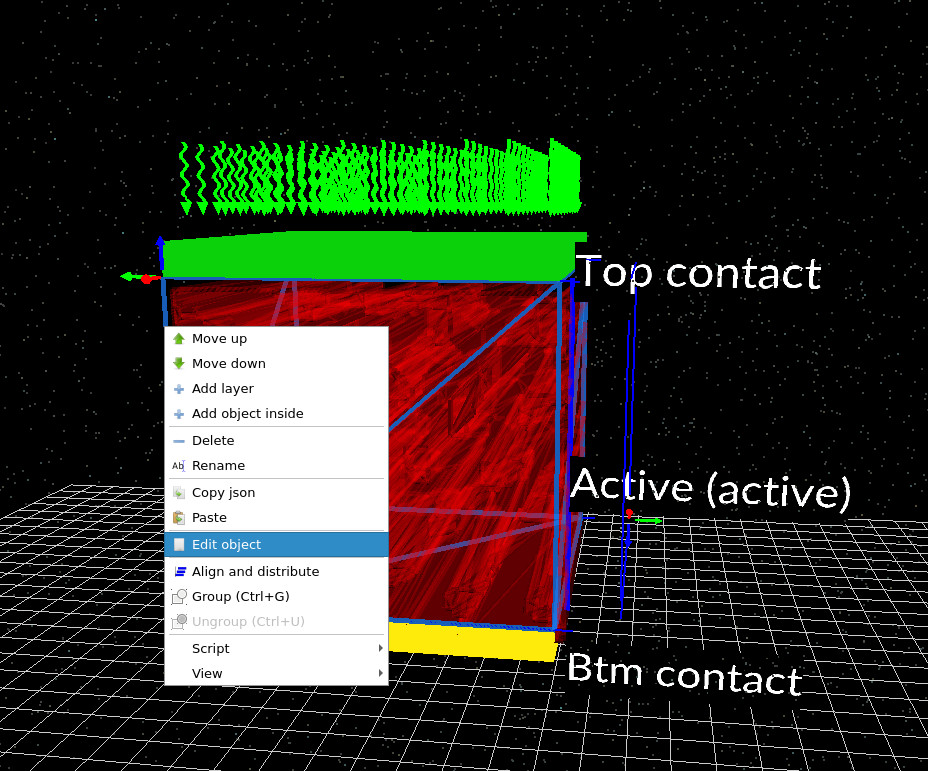
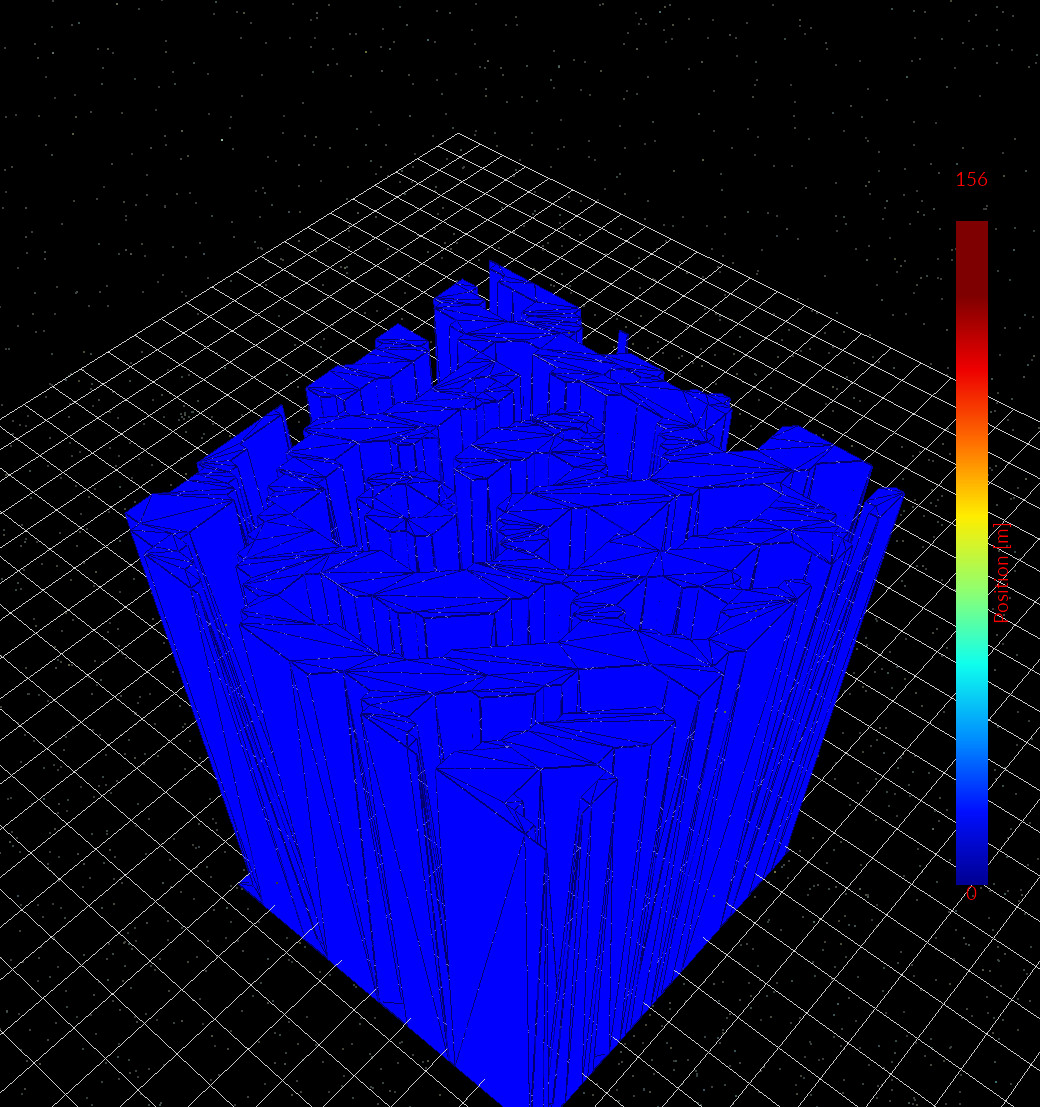
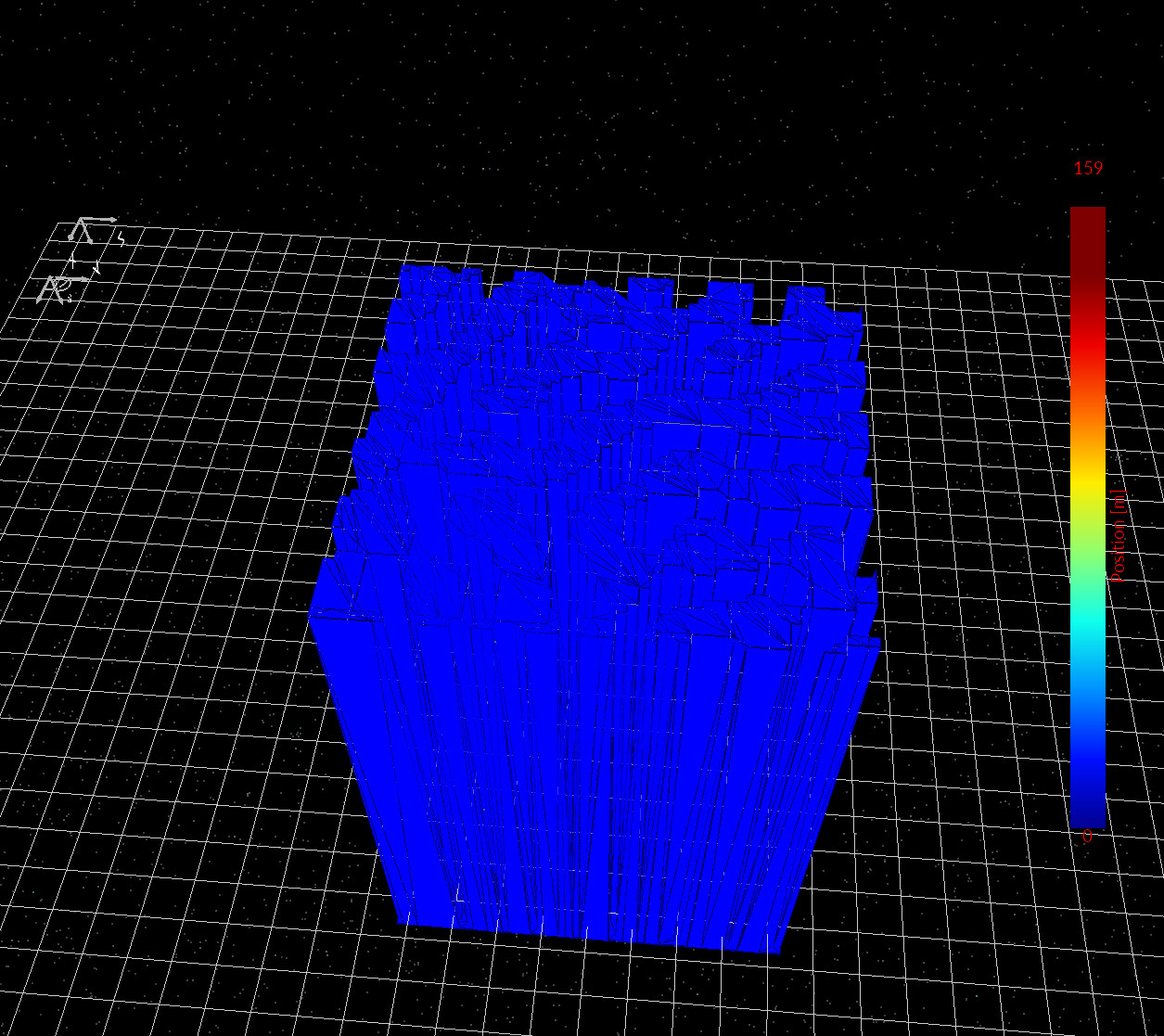
创建项目后,将打开主设备窗口。你应该能看到一个中央的红色对象, 表示体异质结(BHJ)的一个相,嵌入在包围它的活性层区域中,如 ?? 所示。虽然完整的 3D 视图很有信息量,但形貌在视觉上可能很密集。为了让内部 结构更清晰,请右键点击 BHJ 对象并选择 View → Show cut through Y。
启用切面视图后,将得到 ?? 所示的渲染结果,它展示了 3D 形貌中的一个 2D 切片。这使得观察相连通性、界面 以及 BHJ 内部的渗流路径变得容易得多。
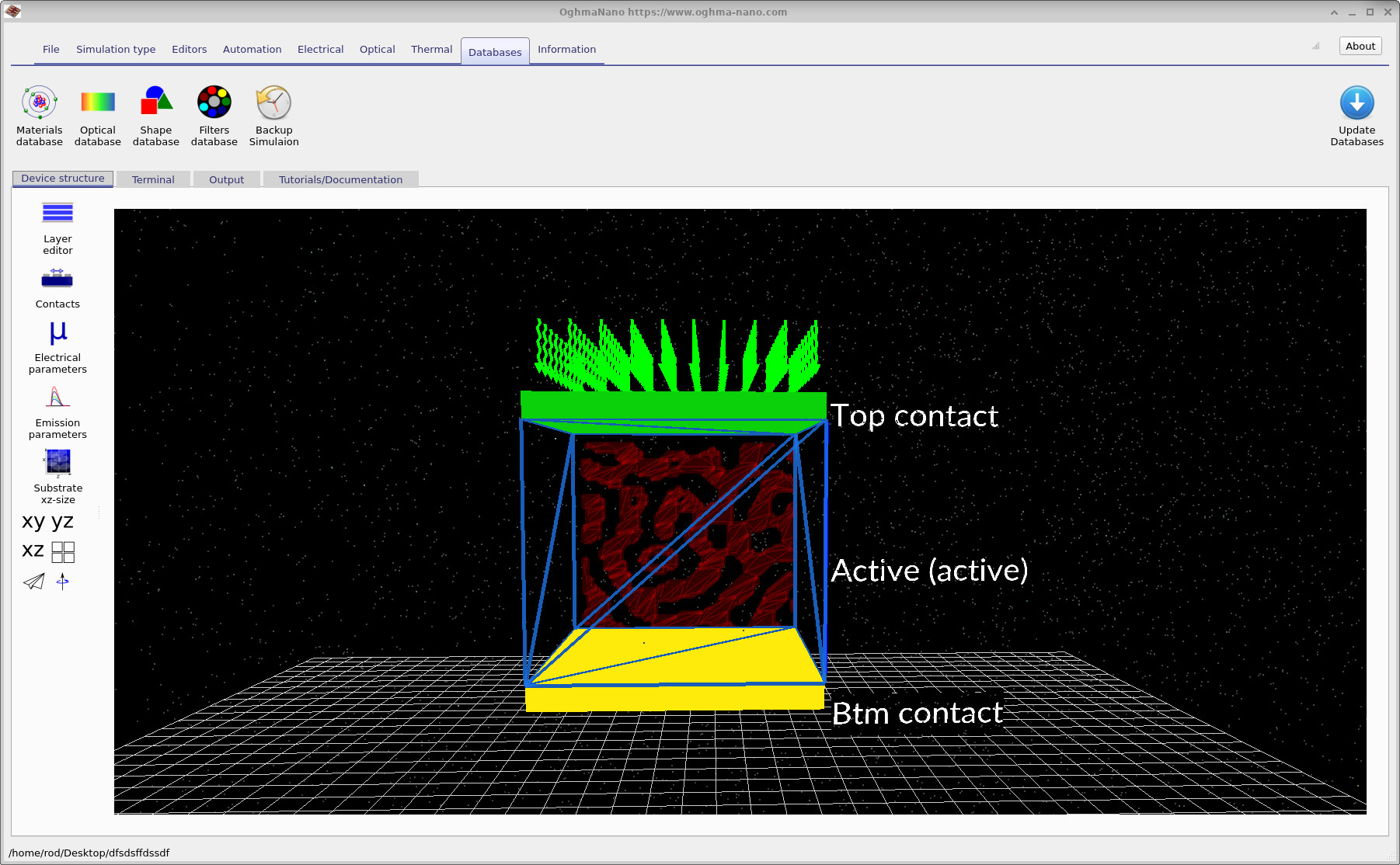
在这个阶段,一个有用的思维模型如下:包围的矩形区域定义了 活性层体积,而嵌入的红色对象定义了一个显式的 BHJ 相(例如聚合物)。互补相则被隐式定义为活性层体积中未被嵌入对象占据的其余部分。 在后续章节检查对象编辑器中的对象属性时,这种区分会变得更加明确。
3. 器件结构:活性层与嵌入式 BHJ 形貌
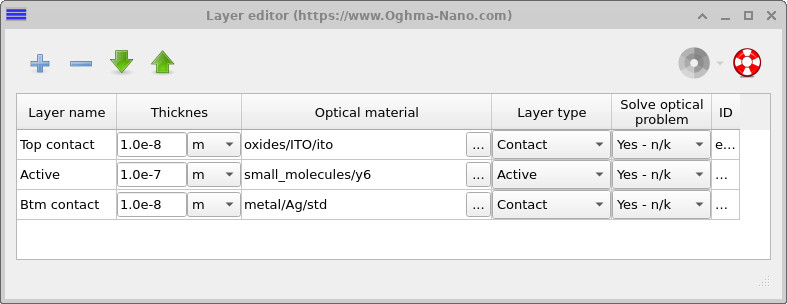
打开 Device structure 选项卡并点击 Layer editor。该器件由三层组成: 顶部接触、单一的 活性层 以及 底部接触 (图 ??)。 这个刻意简化的堆叠使得更容易理解形貌如何进入电学问题,而不会引入额外的界面或传输层。关键点在于, 活性层本身是在层编辑器中定义的一个简单矩形体积。在这个示例中,它被赋予分子材料 Y6 这一受体,并且——单独来看——它只是一个盒子。与体异质结相关的所有结构复杂性都是单独引入的, 通过在该活性层体积内部嵌入第二个对象来实现。这个嵌入对象是一个从 Shape 数据库导入的 复杂 CAD 网格,表示PM6 聚合物相。聚合物网格在活性层内部定义了一个闭合的三维体积。 互补相(受体富集区域)于是被隐式定义为 活性层中未被聚合物网格占据的部分。换句话说,BHJ 是通过体积排除而不是通过显式定义两个互锁网格来表示的。
当检查 3D 视图中的对象时,这种分离会变得清晰。有两个相关对象: 包围的 活性层盒子(通常显示为蓝色线框),以及嵌入的 聚合物形貌(显示为红色)。要检查它们的属性,请右键点击蓝色包围 区域并选择 Edit object,如 ?? 所示。
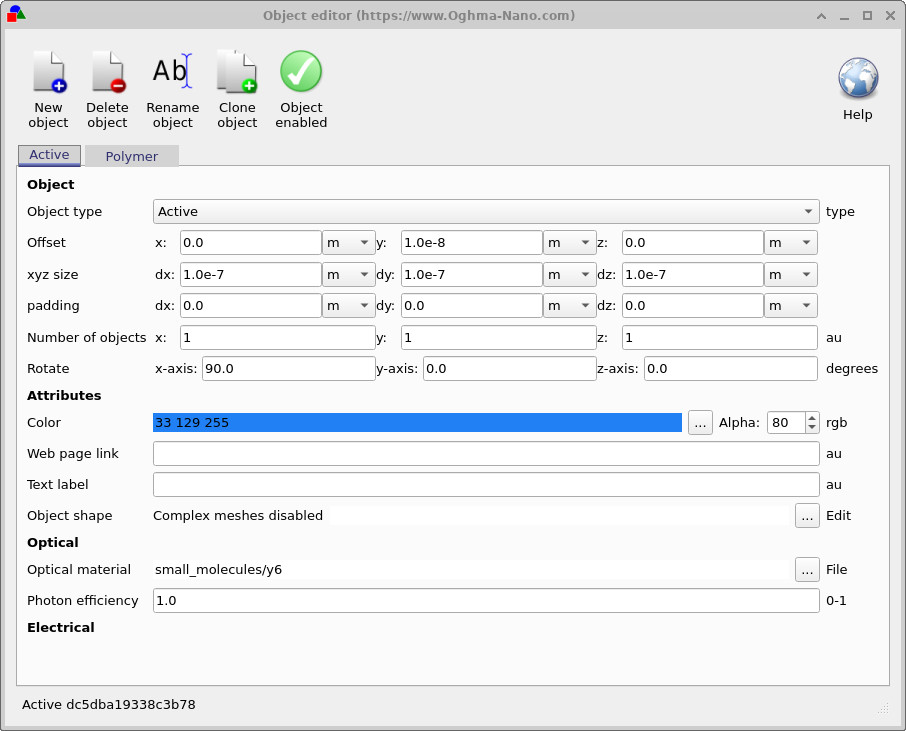
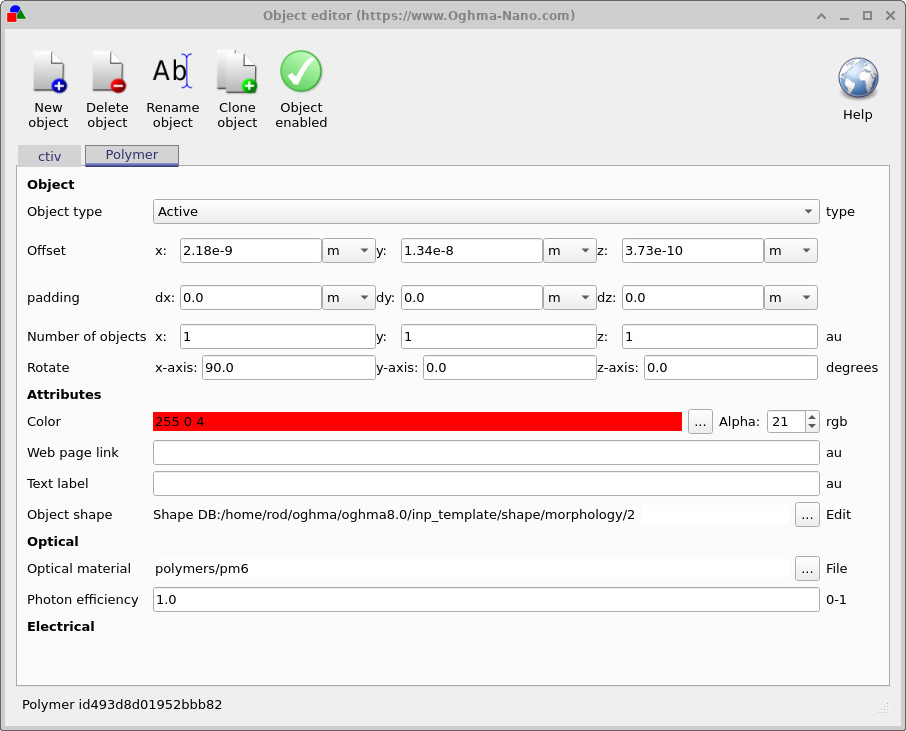
在对象编辑器中,这种区分是明确的。对于包围的 Active 对象, Object shape 是一个简单盒子(复杂网格被禁用)。对于 Polymer 对象,Object shape 指向一个 Shape DB 条目, 即定义 PM6 形貌的三角网格。 切换该引用会替换聚合物形貌,而周围的活性层保持不变。
这种构造——简单的活性层盒子加上嵌入式聚合物体积——是 OghmaNano 中处理 BHJ 形貌的核心方式。 它使几何结构易于理解,确保聚合物相形成一个定义良好的闭合区域,并允许你在运行电学求解器时研究 聚合物网络中的渗流、连通性和收缩通道如何影响电荷传输。
4. 电学参数:迁移率和 SRH 陷阱带
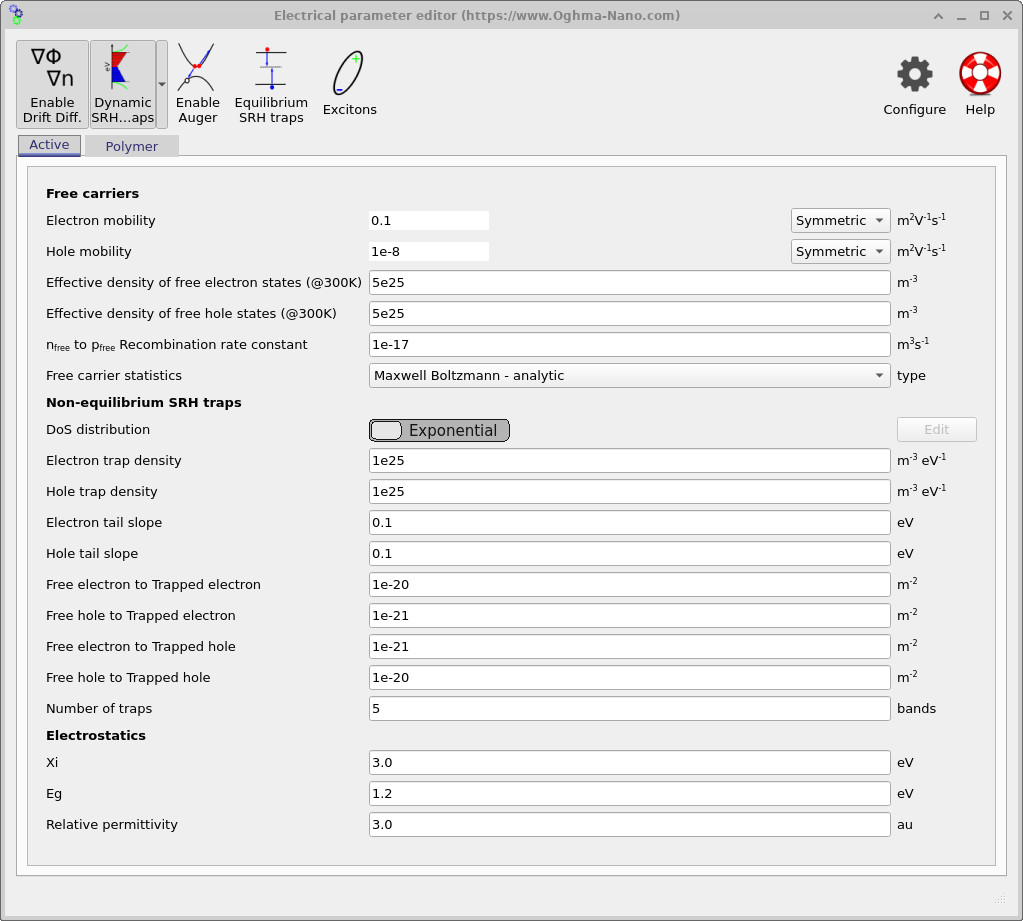
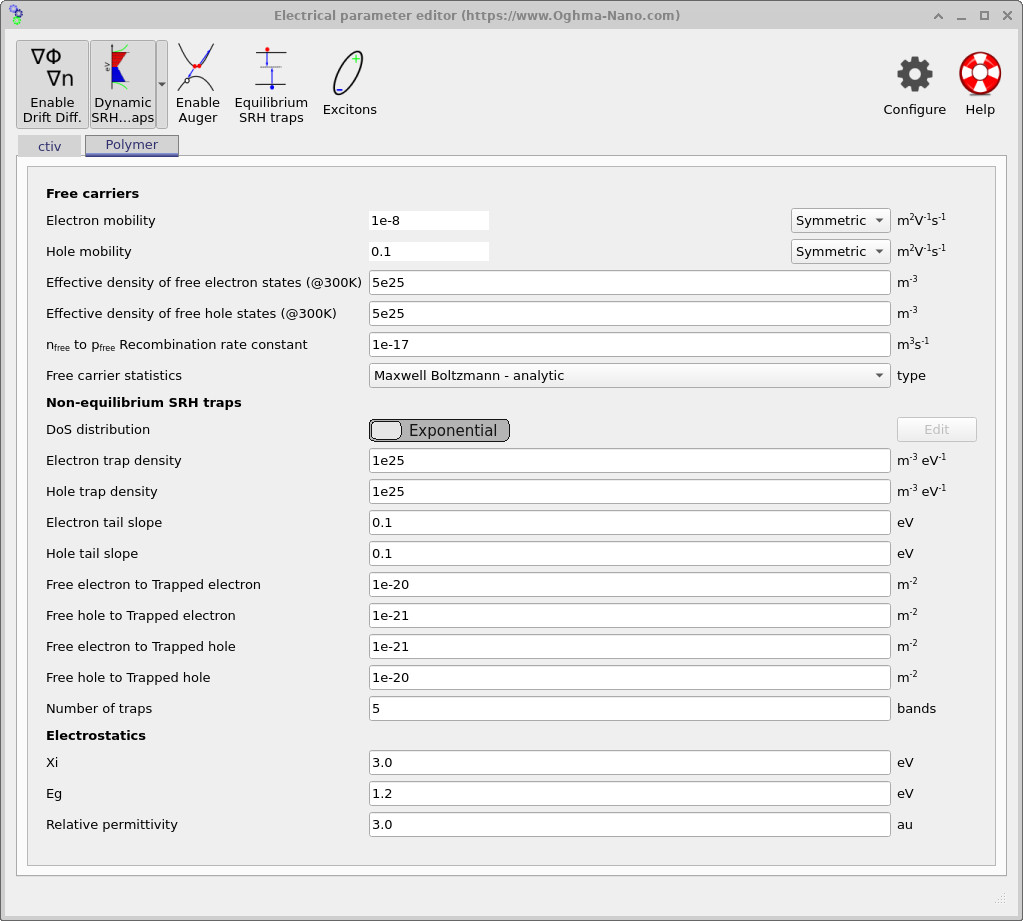
从主窗口打开 Electrical parameters 编辑器。 为活性层的两个相提供了独立的参数面板: 包围的 Active 区域(受体 / 基体)和嵌入的 Polymer 形貌,如 ?? 和 ?? 所示。 正是在这里,这两个互相贯穿的相在电学上被区分开来。
两个相都使用相同的基本传输形式:采用 Maxwell–Boltzmann 载流子统计和对称迁移率张量的 drift–diffusion。 关键区别在于刻意设置的 迁移率反差。 在聚合物相中,空穴迁移率较高,而 电子迁移率被抑制;在互补的活性 相中则相反。 这会强制实现选择性传输:空穴通过聚合物 网络渗流,而电子通过基体渗流。
这种简单的不对称性已经足以产生具有物理意义的 BHJ 行为。 即使在运行仿真之前,它也已经定义了你在空间输出中应当看到的内容: 连续的渗流路径、载流子在几何上被困住的死胡同,以及收缩区域或 连通性较差形貌中的局部电荷积累。除了自由载流子传输之外,两个相中还都启用了 非平衡 Shockley–Read–Hall (SRH) 陷阱。 如参数面板所示,态密度使用 电子和空穴的指数尾分布表示, 并且两个相中都使用相同的陷阱密度和能量斜率。 求解器会在每个网格点跟踪五个离散陷阱带。
每个陷阱带都通过显式的俘获和发射项(编辑器中可见的自由到陷阱耦合常数) 与自由载流子群体动态交换载流子。因此,正在求解的系统不仅包括自由电子和空穴密度, 还包括每个空间位置上的多个陷阱载流子群体。 这会显著增加数值刚性和计算成本,但对于捕捉无序有机半导体中的色散传输、陷阱辅助复合以及 真实瞬态行为是必不可少的。这里使用的数值旨在作为一个稳定、说明性的示例, 而不是一个经过校准的材料模型。 一旦理解了这一工作流程,这些参数就可以被进一步细化、通过实验验证, 或在目标是隔离形貌和渗流效应而非陷阱物理时进行简化。
5. 网格
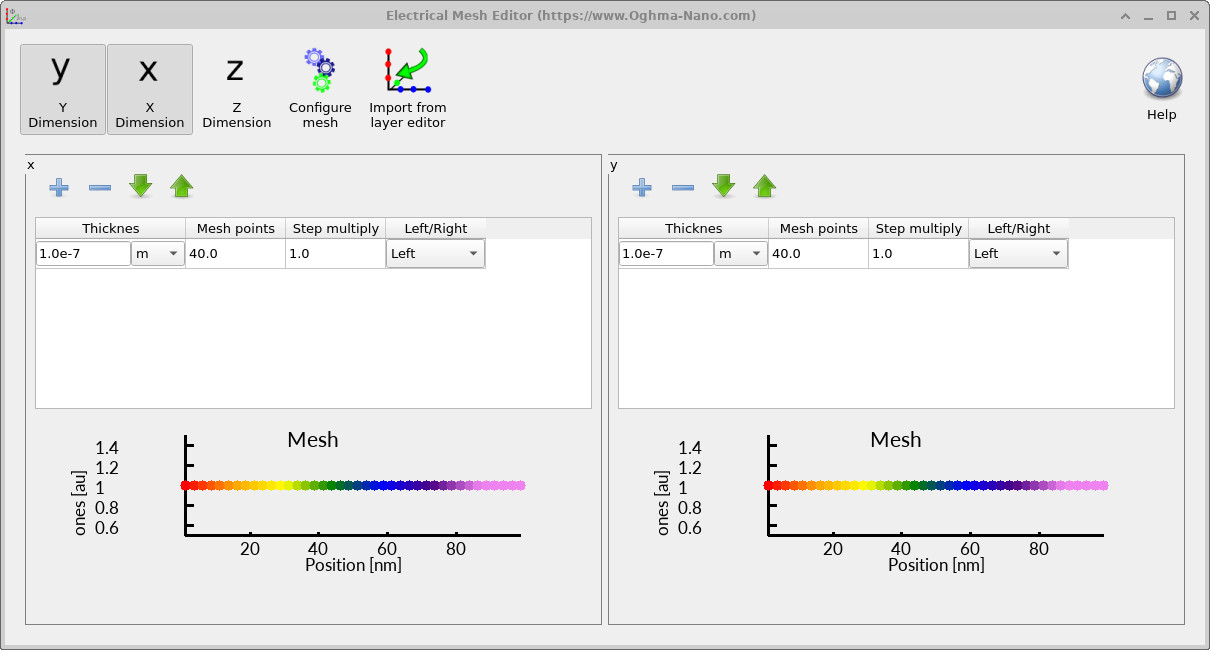
在运行仿真之前,值得检查一下 电学网格 以确保其合理。 在主窗口中,打开 Electrical 功能区 (图 ??) 并点击 Electrical mesh。这将打开 ?? 所示的网格编辑器。
在这个示例中,xy 平面中的网格为 40 × 40,这意味着电学 问题是在二维中求解的。z 方向被有意省略。 OghmaNano 中可以进行完全三维的电学仿真,但它们需要真正的 3D 形貌, 同时计算成本和复杂性也会显著增加。 构建和解释此类模型超出了本教程的范围。
因此,这个计算应被理解为器件中的一个2D 截面。 该切片通过形貌的中心,并在该平面内保留了完整的横向 BHJ 微观结构。 这种方法能够捕捉渗流、瓶颈和相连通性,同时仍然保持快速、易于解释, 并且非常适合教程级别的探索。
6. 运行仿真
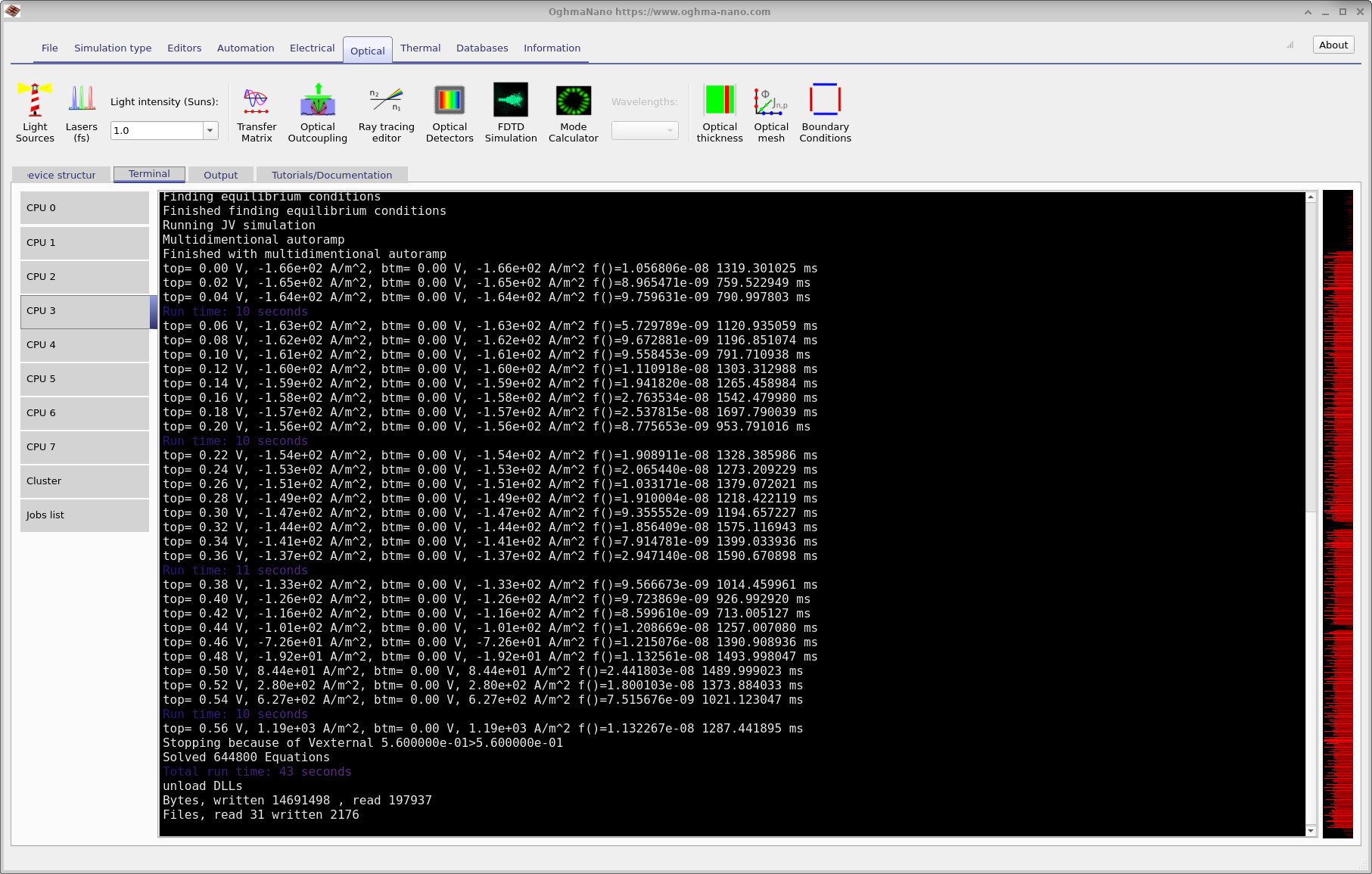
点击主窗口中的蓝色 Run simulation 按钮以启动求解器。在运行过程中, 终端会打印每一步的偏压点和电流密度(??)。在该示例中,施加到 顶部接触的偏压从 0.00 V 步进到约 0.54 V,以生成 JV 扫描。 在低偏压下,照明条件下报告的电流密度为负,而当偏压接近开路状态时,净 电流会穿过零点并改变符号,这与太阳能电池行为一致。
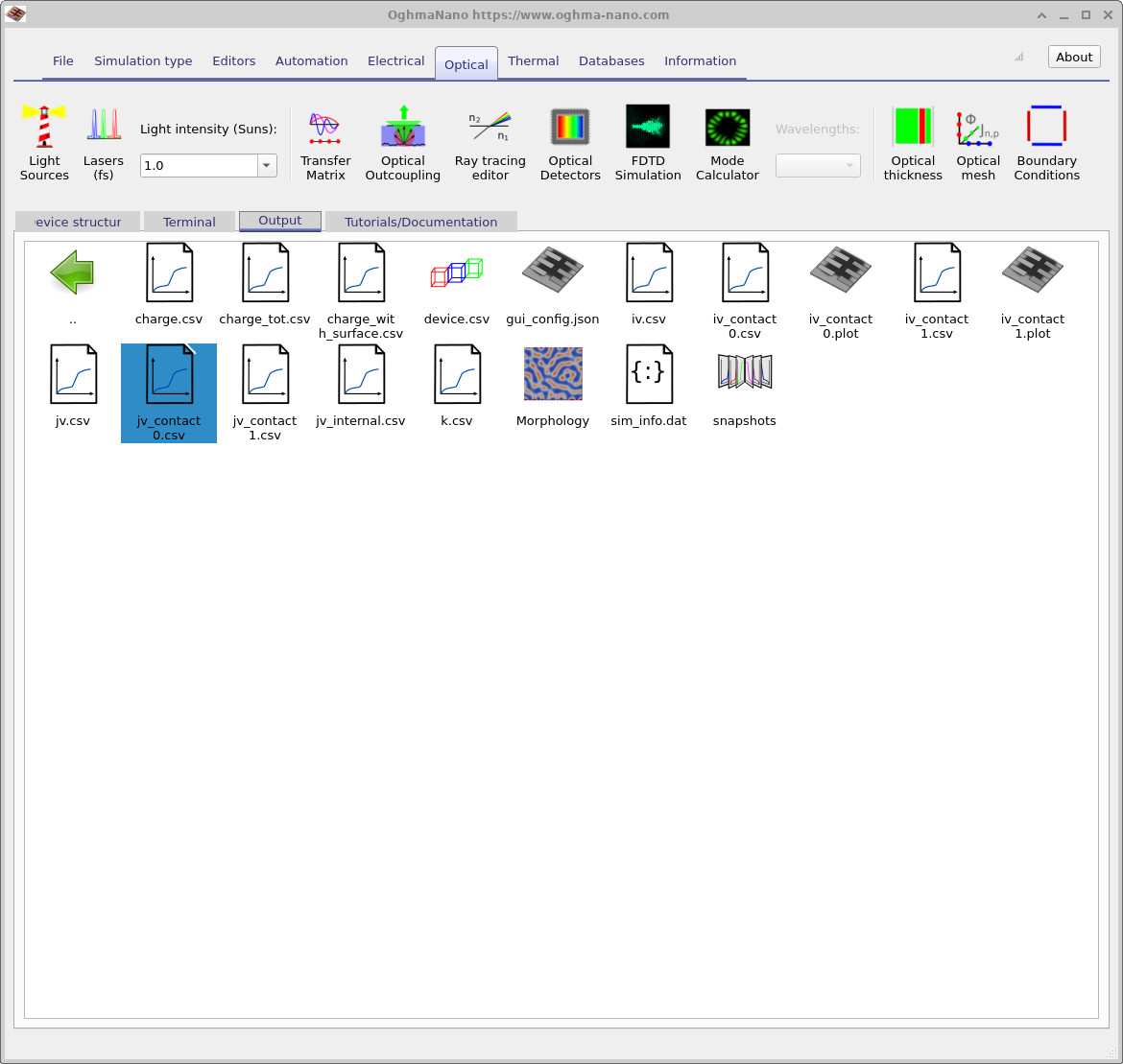
运行完成后,打开 Output 选项卡(??)以检查生成的文件。 终端摘要会报告总运行时间、已求解方程数量以及基本磁盘 I/O 统计。对于形貌解析 仿真,值得监控文件输出:即使求解器本身很快,写入大量快照也可能主导运行时间。
作为几何结构合理性检查,双击 device.csv 以查看求解器内部使用的器件三角化表示
(??)。这确认了 BHJ
形貌已按预期导入并离散化。
要查看电学性能,请打开 jv_contact_0.csv 或 jv_contact_1.csv 来绘制 JV 曲线
(??)。对于这个 2D 仿真,
应使用按接触输出的 JV 数据;jv.csv 可以忽略。
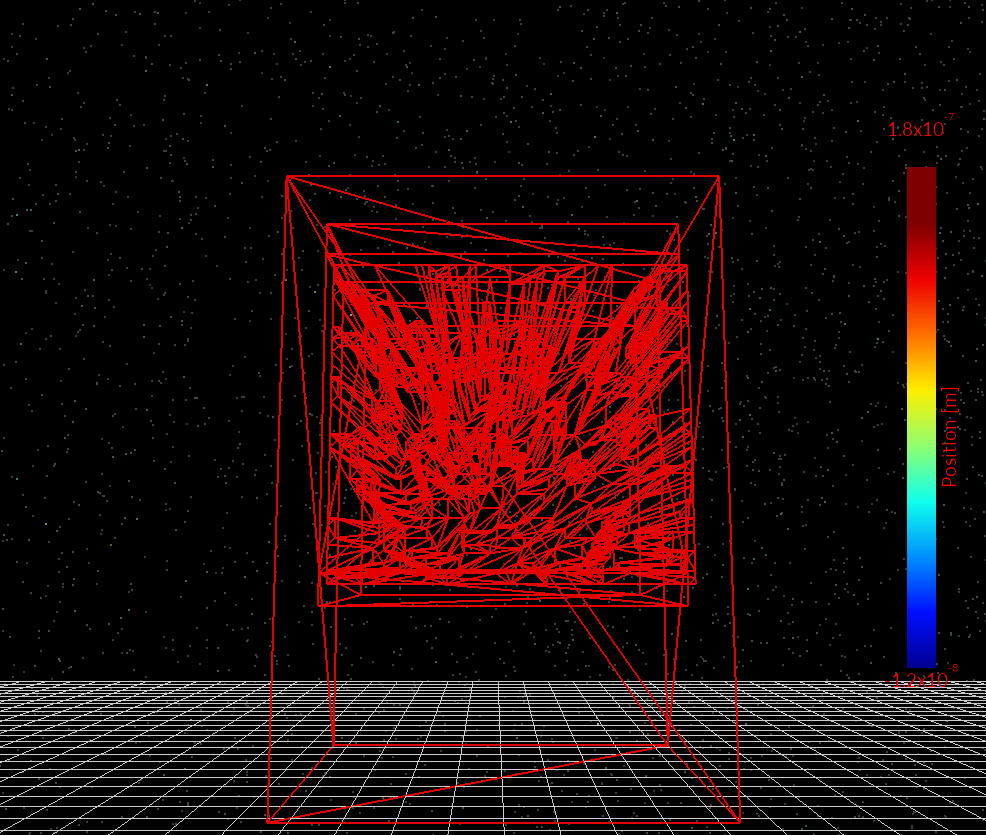
device.csv)。
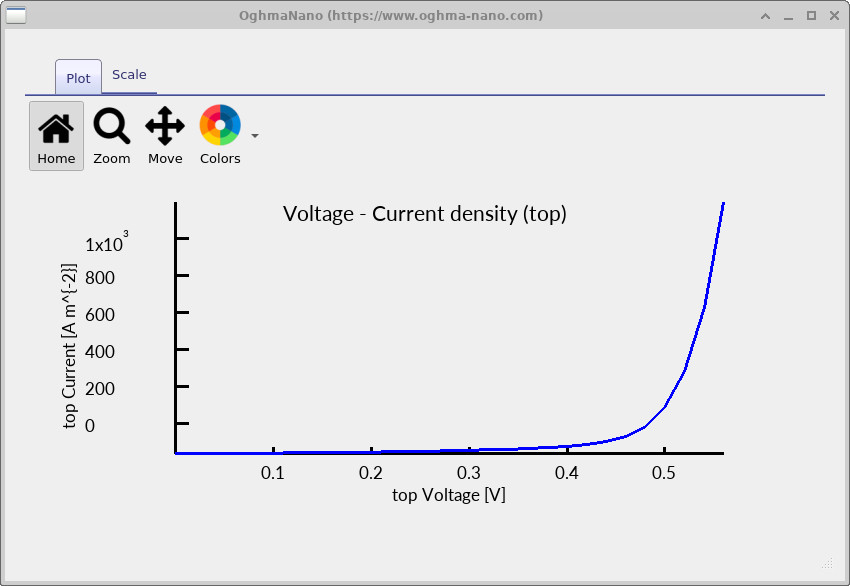
jv_contact_0.csv / jv_contact_1.csv 的 JV 曲线。
7.0 检查仿真快照
运行完成后,最有信息量的输出位于
snapshots/ 目录中。快照文件保存了
drift–diffusion–SRH 系统的内部状态变量,并作为施加偏压的函数写出。
它们揭示了每个电压步长下传输方程的空间解析解,
而不是后处理汇总结果。
打开快照后,会出现两个控件:一个偏压
滑块,用于在 JV 扫描中步进;以及一个切面
位置滑块,用于选择穿过形貌的 2D 切片。
在整个教程中,电学问题都是在 2D 切片上求解的,
所有快照数据都对应于该切片。
图
??–
??
显示了固定偏压下具有代表性的 2D 快照。这些量应当
结合起来解释。导带(LUMO)分布,
Ec.csv(??),
定义了电子的能量环境。在形貌解析
仿真中,由于相依赖能级和对局部电荷积累的静电响应,
该分布在横向上会发生变化。自由电子密度,
Q_nfree.csv(??),
突出了电子能够在受体/基体网络中高效移动的区域。
强烈的空间变化表明存在渗流路径、
收缩通道和由形貌诱导的瓶颈。
陷阱电子密度,
Q_ntrap.csv(??),
揭示了载流子在陷阱态中积累的位置。比较自由与陷阱
密度通常是识别提取不良区域或
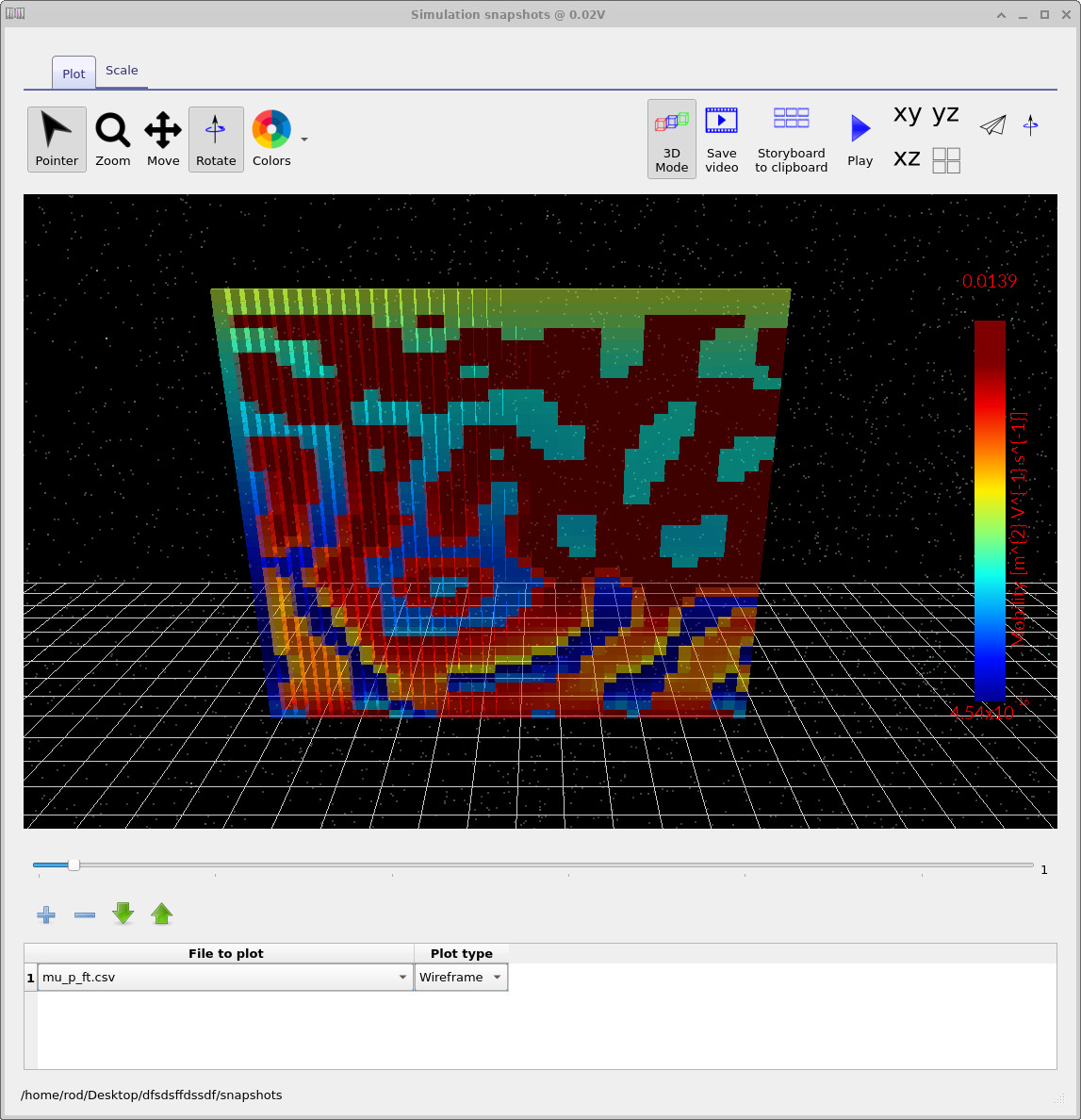
与 BHJ 形貌相关的强局部陷阱的最快方法。迁移率相关输出,
mu_p_ft.csv(??),
显示了对自由和陷阱载流子进行平均后的有效迁移率。空间
变化既反映内在相反差,也反映局部陷阱效应,并且通常
与底层网络的连通性高度相关。
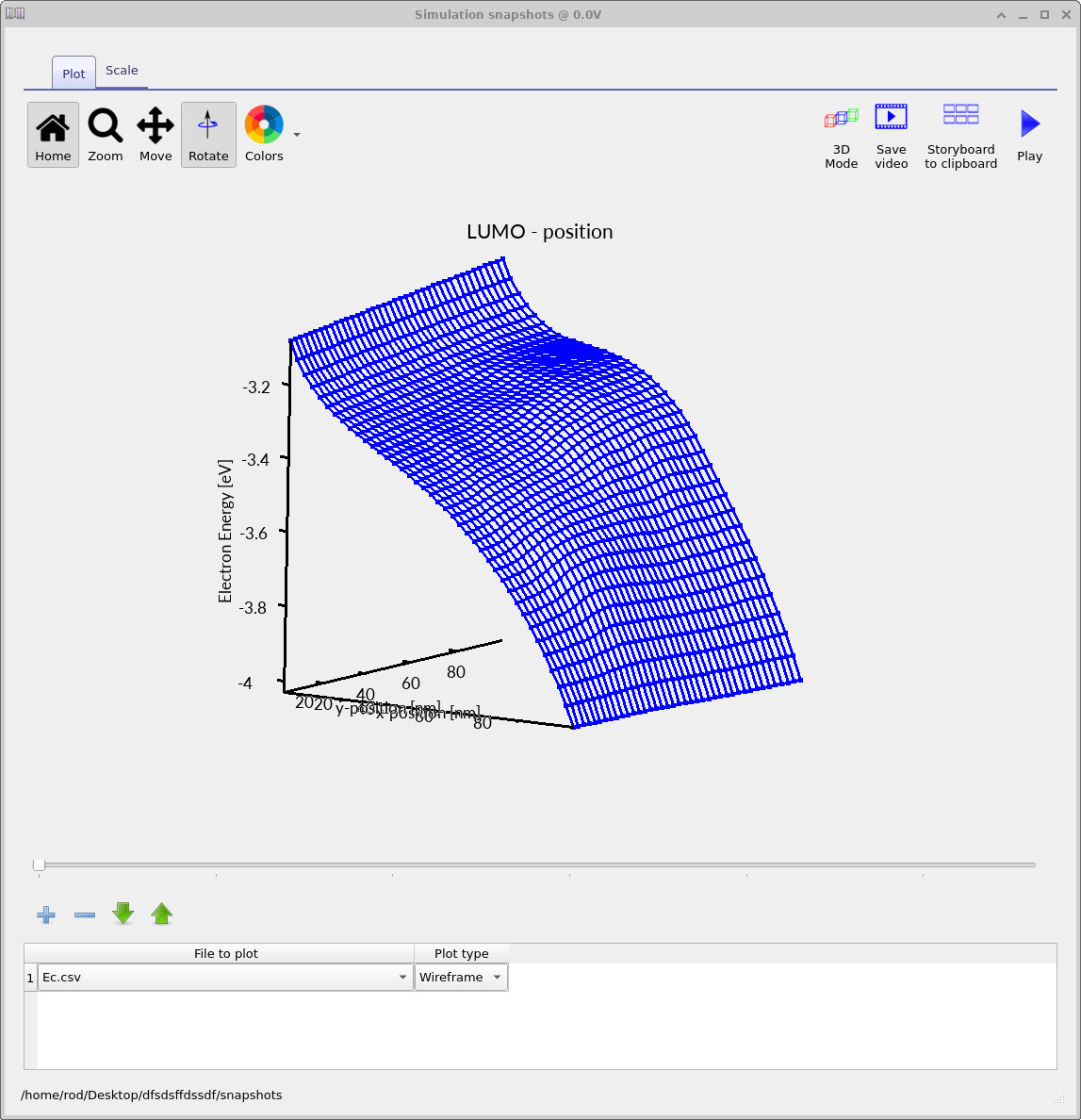
Ec.csv:导带(LUMO)分布。
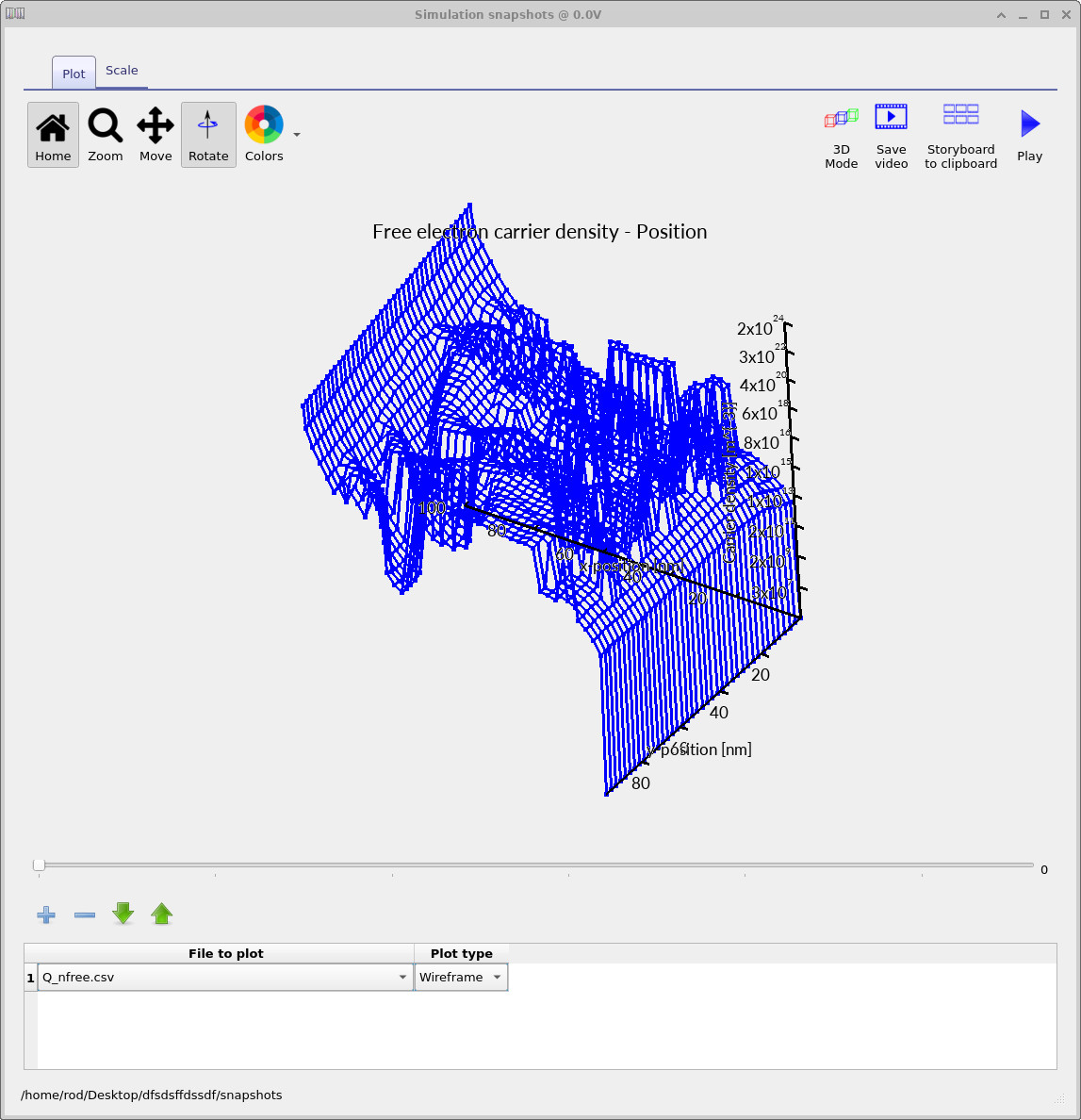
Q_nfree.csv:自由电子密度。
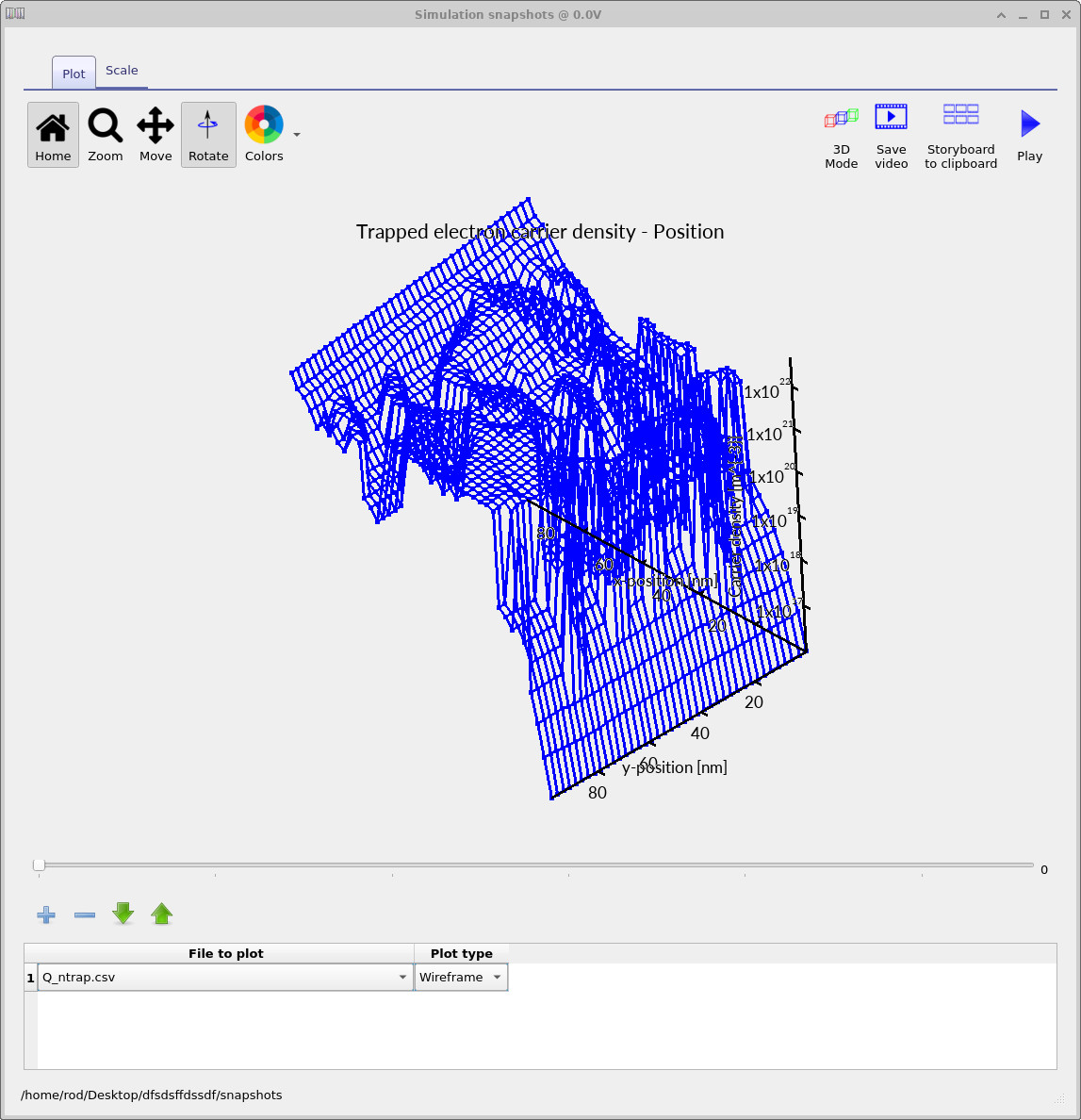
Q_ntrap.csv:陷阱电子密度。
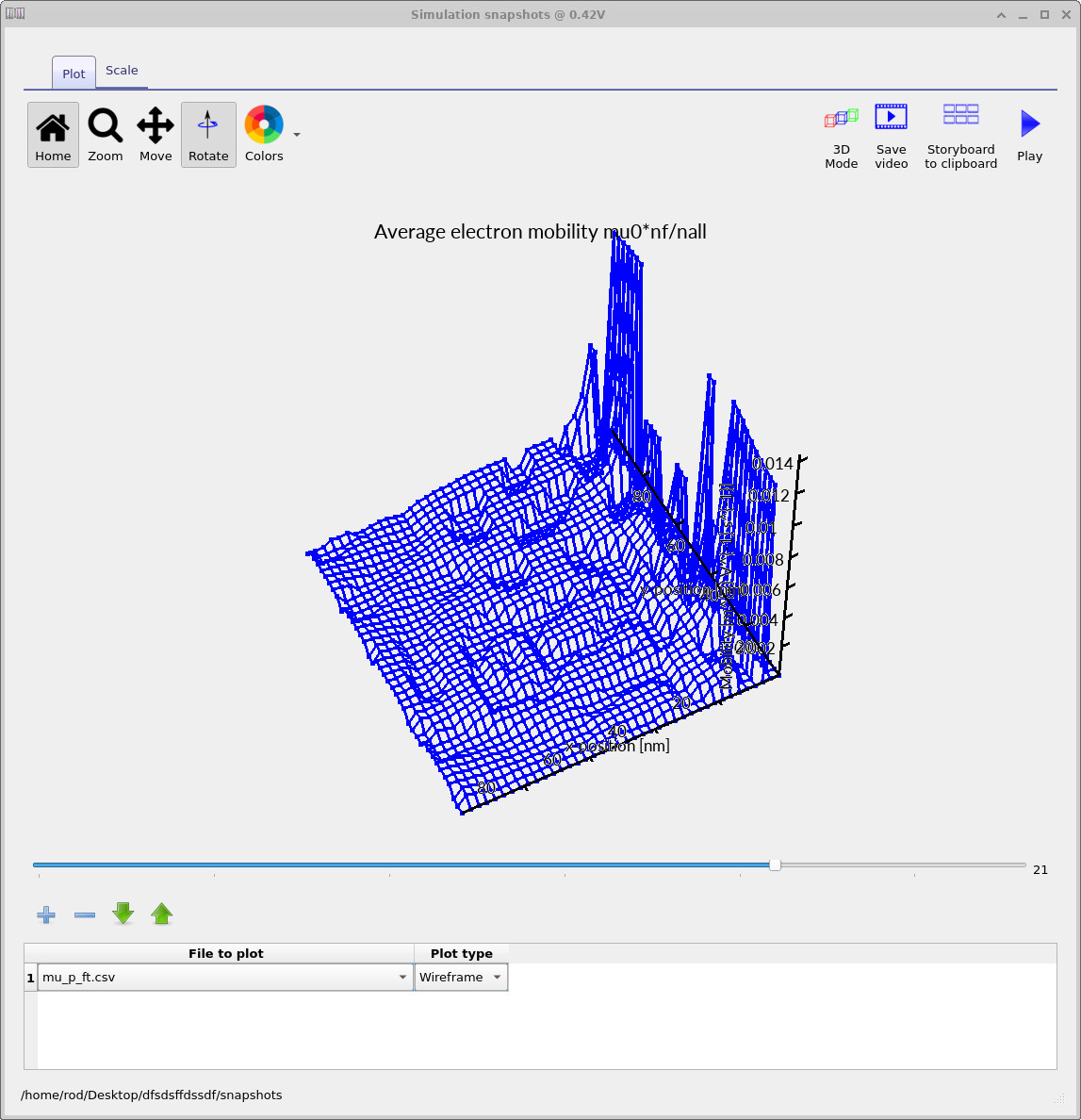
mu_p_ft.csv:对自由和陷阱载流子平均后的迁移率。
虽然 2D 视图通常是分析空间变化最清晰的方式,但有时
在实空间中解释同样的数据会更容易。通过在快照窗口中启用
3D mode,2D 切片会被重新投影回
器件几何中。图
??–
??
给出了这种投影的示例。平均电子和空穴迁移率
(mu_n_ft.csv、mu_p_ft.csv),自由电子
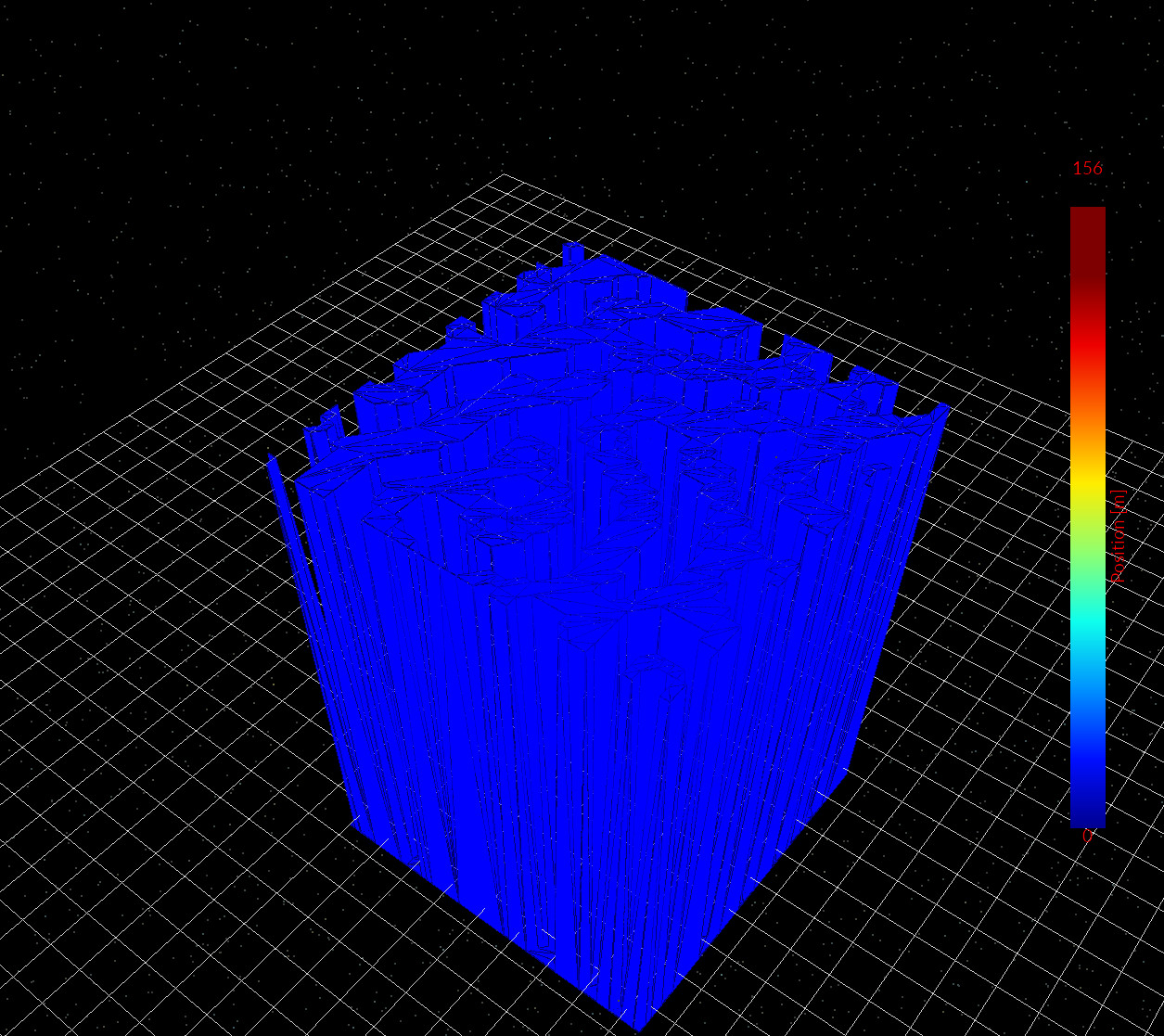
准费米能级(Fn.csv),以及沿
传输方向的电子电流密度(Jn.csv)特别适合用来可视化
通过 BHJ 的渗流路径和电流流动。
这些快照输出提供了形貌解析 仿真的主要科学价值:它们允许将器件尺度可观测量直接关联到 体异质结内部的局域能级、陷阱和连通性。
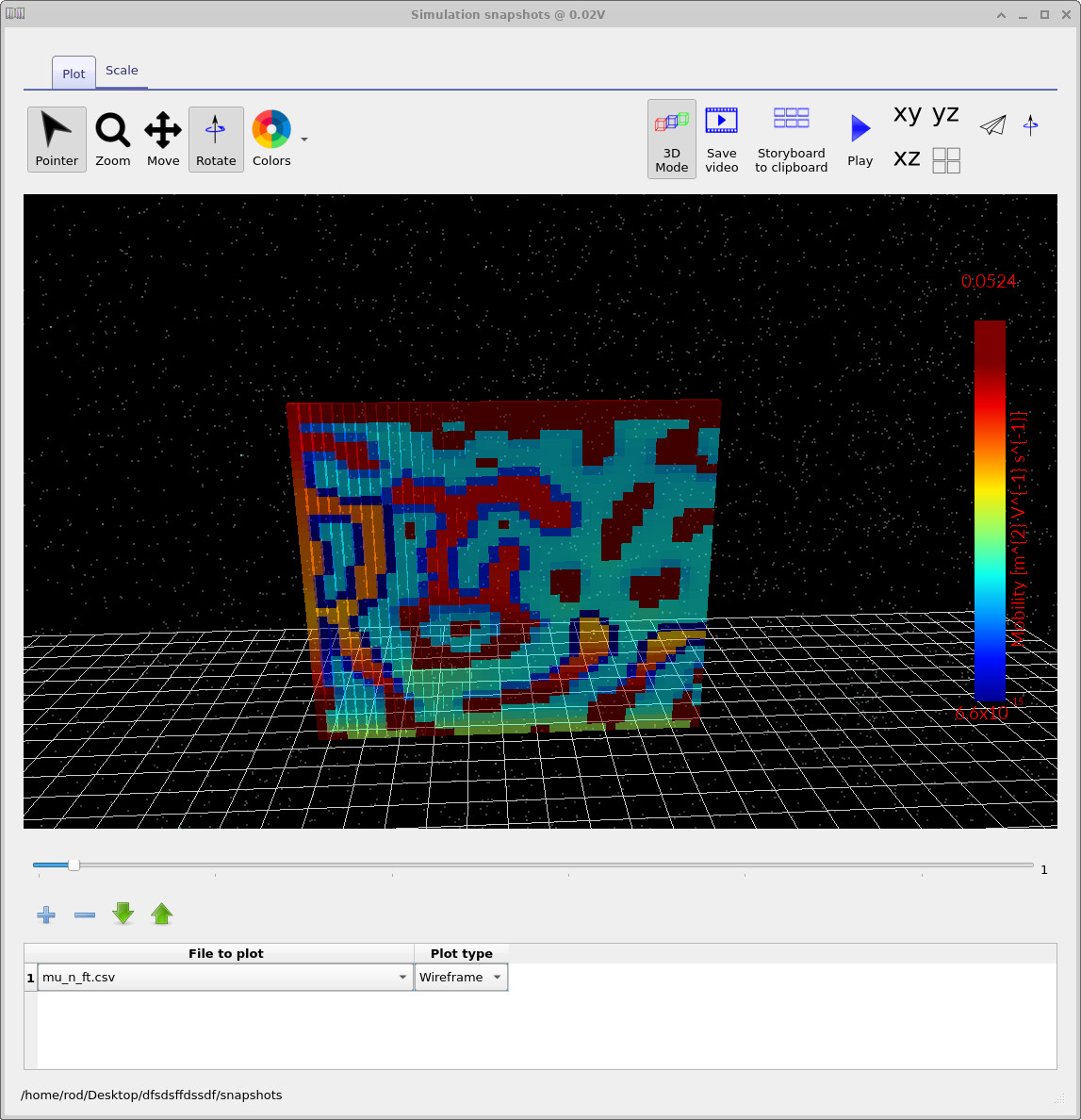
mu_n_ft.csv:平均电子迁移率(3D 视图)。
mu_p_ft.csv:平均空穴迁移率(3D 视图)。
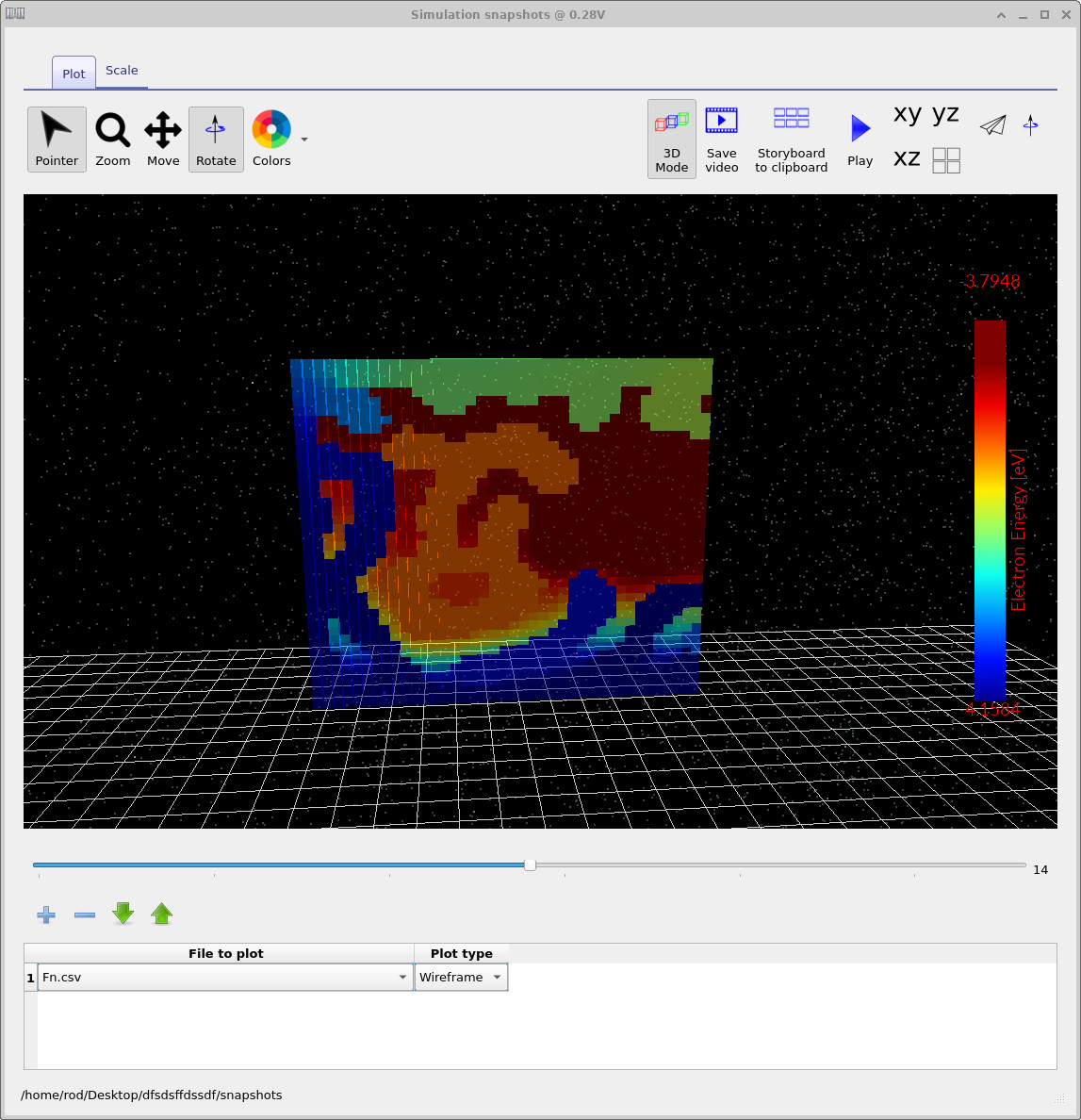
Fn.csv:自由电子准费米能级。
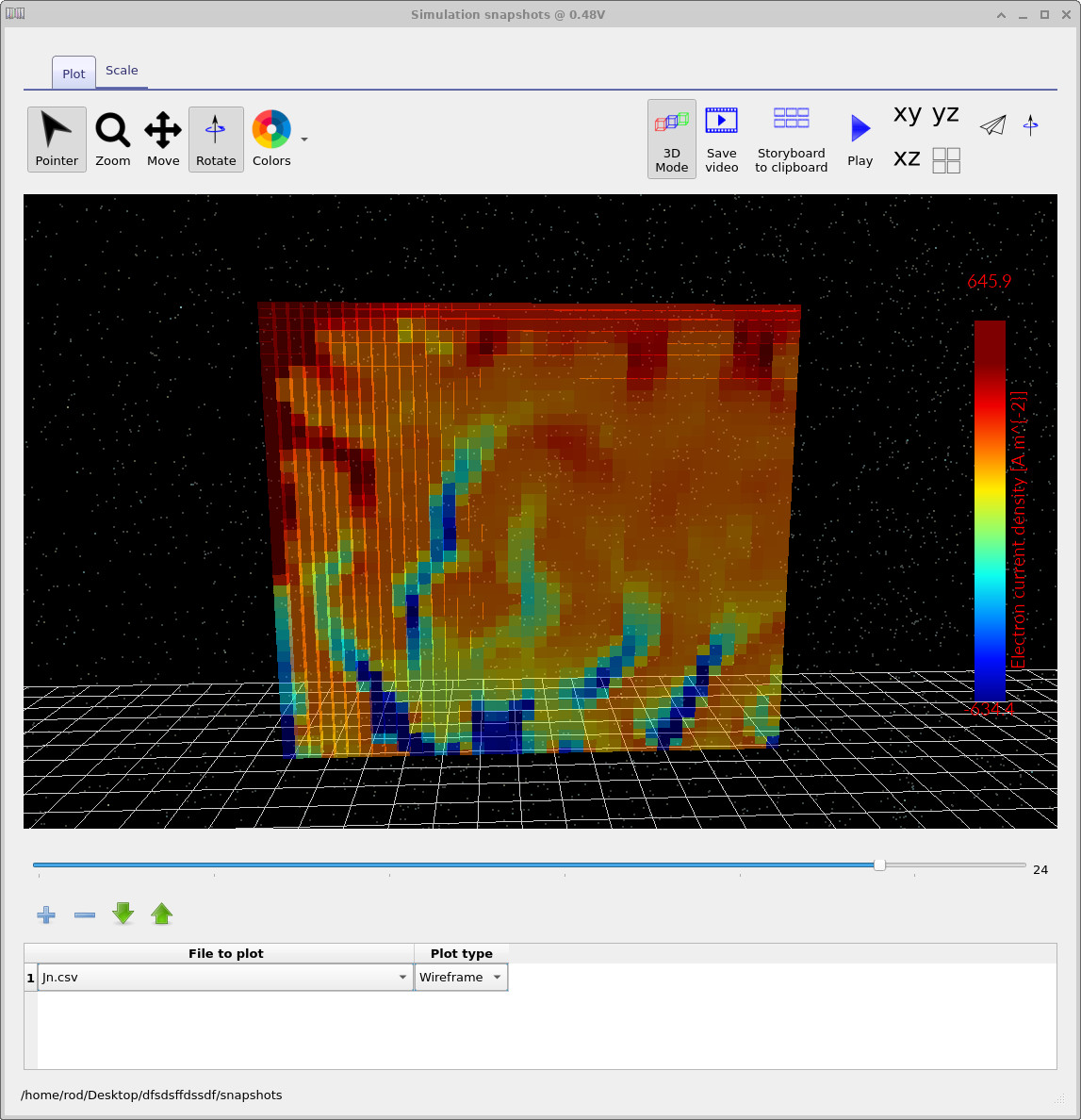
Jn.csv:电子电流密度(y 方向)。
8. 可尝试的任务
建立直觉的最快方法是扰动模型并观察变化。下面的任务旨在快速完成: 交换形貌网格,重新运行,并比较 JV 曲线(如果有时间,也可以比较相同偏压下的几个快照)。
任务 1 — 交换形貌网格
在主设备视图中,右键点击红色 BHJ 对象(嵌入式聚合物网格)并选择 Mesh editor。在编辑器中,当前选项应为 Shape from database。 将所选形状更改为 morphology/1、morphology/2 和 morphology/3(图 ??, ??, ??)。 每次更改后重新运行仿真并比较 JV 曲线。
你需要关注的是连通性和瓶颈如何改变提取与复合:某些形貌会产生更清晰的 渗流路径(更高电流),而另一些则会迫使载流子通过狭窄的颈部和死胡同(更多积累、更多陷阱, 并且通常导致更差的 JV 性能)。
作为一个刻意“错误但很有启发性”的实验,你还会在数据库中找到一个名为 teapot 的形状。 将 BHJ 网格替换为 teapot,重新运行,并为一个具有茶壶形夹杂体的器件生成 JV 曲线。 这并不是一个物理上合理的 BHJ,但它证明了该工作流程确实是由几何驱动的:任何闭合 CAD 网格都可以 被插入并进行电学分析。
任务 2 — 改变陷阱强度(SRH 陷阱带)
在 Electrical parameters 中,调整非平衡 SRH 陷阱设置并重新运行。一次尝试一个改动:
- 将陷阱密度增加/减小 1–2 个数量级,并比较
Q_nfree与Q_ntrap。
这个任务的重点是观察色散/陷阱限制传输如何与形貌竞争:陷阱通常会放大“坏”区域(死胡同、收缩通道),因为电荷无法足够快地排空。
任务 3 — 改变复合速率常数
仍然在 Electrical parameters 中,修改复合并重新运行。两个简单扰动:
-
将自由-自由复合速率常数(
n_free到p_free)上下改变 1–2 个数量级。 观察 JV 曲线和电荷空间分布如何响应。 -
如果你的项目暴露了 SRH 俘获/耦合参数(自由↔陷阱耦合常数),则将它们一起按比例放大/缩小,并在相同偏压下比较
Q_nfree和Q_ntrap的平衡。
对于任务 2–3,一个有用的习惯是保持形貌不变,一次只改变一个参数,然后每次都检查相同的两件事:
(i) JV 曲线如何变化,以及 (ii) 电流路径(例如 Jn 和准费米能级场)是否变得更平滑,
还是更被微观结构“碎裂化”。